

中央大学 理工学部精密機械工学科 助教である山田泰之さん。山田さんは、以前、弊社が取材をさせていただいたジェームズ ダイソン アワード2016にて国内審査2位を獲得された実績をお持ちの方で、その時にもインタビューをさせていただきました。(その時の記事はこちら)
精力的に研究に取り組まれている山田さんに、今回は改めて、研究所の取材をさせていただくことができました。
バイオメカトロ二クス研究室を率いる中村太郎教授は、生物や生体の動きを活かしたロボットなどの研究を行っており、特にミミズロボットで世界的に有名な方。研究室には、不思議な形をしたロボットが、所せましと広げられていました。


こちらがミミズ型ロボット。
ミミズの伸び縮みしながら進んでいく動きは蠕動(ぜんどう)運動と呼ばれており、こちらのロボットにはその動きが活かされています。この蠕動運動は、移動に要する空間が小さくてすむことから、狭い場所でも自由に移動ができるのが特徴なのだそう。
例えば、細い管の中や、地中など、普通であれば入り込むことが難しい場所でも進んでいくことができ、ダクトの掃除をしたり下水管の調査,月の地中探査など、色々な場面での応用が可能だといいます。

こちらは、山田さんがジェームズ ダイソン アワード2015にて国内2位国際20位を獲得したハイヒール『YaCHAIKA』。ハイヒールを履いている時の、痛みといった辛さを軽減することを目的に開発されました。
ハイヒールを履いている時、足が伸びきり関節が固定されてしまうことが、辛さを引き起こす原因だということに着目。それを解決する為に、YaCHAIKAの踵部分はバネで作られています。このバネによって、立ち止まっている時でも足が少し動くようになっており、それによって血流が促され、足の疲労を緩和するようになっているそう。また、歩いている時に足に来る衝撃をバネが軽減してくれるので、歩行の際の疲労を軽減してくれるようになっています。
ジェームズダイソンアワードで受賞が発表された後、1週間もしないうちに企業から製品化したいというオファーがあったとのことで、現在、着々と製品化を進めているといいます。
更には何とパリコレにも出展!
デザイナーである森永邦彦さんが手がけるブランドのアンリアレイジ(http://www.anrealage.com/)とコラボレーションをされたとのこと。ロング・ショートに色違いと、バリエーションも豊富に作ったのだといいます。
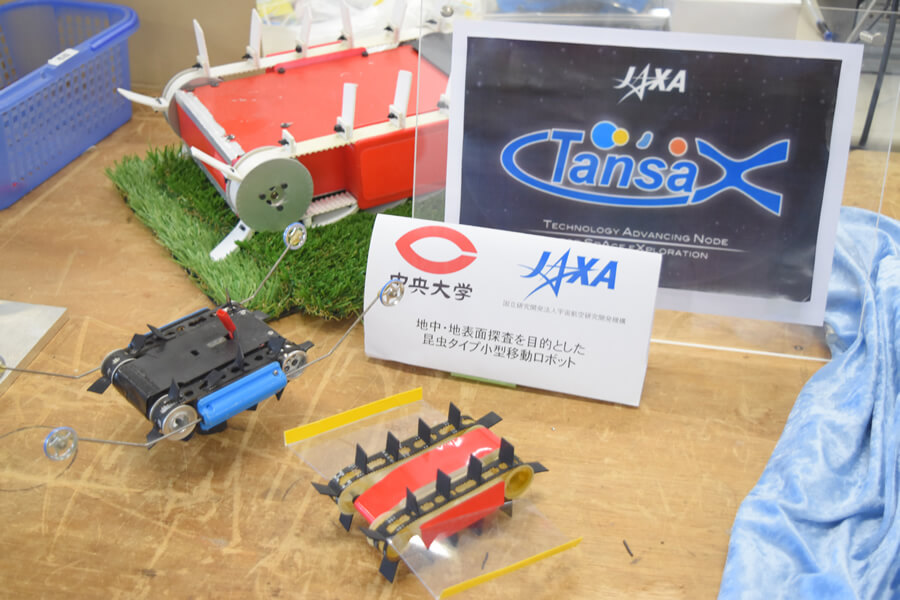
こちらは、JAXAと共同研究中の多足歩行小型ロボット。JAXAが一般公募をしている宇宙探査イノベーションのプロジェクトに採択されて、共同研究が実現したそうです。
大がかりなロボットは、5000万円から1億円と高価であるのが現状で、その操作や、故障してしまった時の責任は利用者である地方自治体などが負わないといけないことから、十分に活用されない問題があるそう。
そこで、考えた付いたいたのが、機能は少ないけれどコンパクトなロボットを大量に作り、それらを複数ばらまくという方法。大量のロボットのうち、どれか一つでも目的を達成すればいいという発想です。
この多足歩行小型ロボットは、構造がシンプルで安価に作れるのはもちろん、昆虫の動きが活かされており、速く進め、かつ段差も越えて行くことができるようになっています。元々は、活火山の調査の為に作り始めたロボットだったそうですが、そこから今回のJAXAのプロジェクトに展開されたということです。
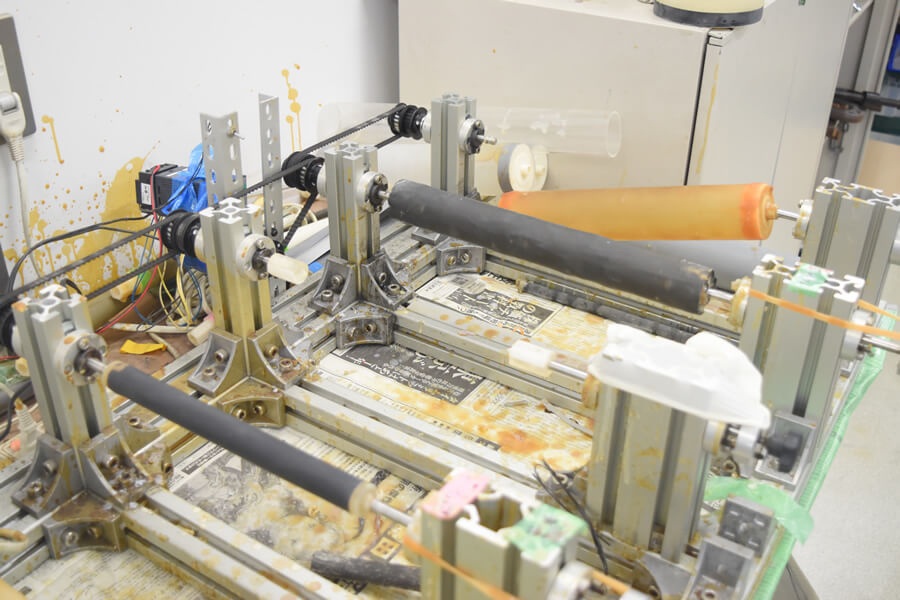
こちらは、ロボットに使う人工筋肉を作る装置。ゴムを塗りながら、繊維を詰めていくことで、人工筋肉が出来上がるのだそうです。

こちらは、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)のプロジェクトで取組んでいる可変粘弾性型軽量アシスト装置(Air sist :エアシスト)。股関節と膝の関節をアシストしてくれるのだそうです。
従来ある様なモーターのアシスト装置とは違い、ゴムによる人工筋肉で出来ており、柔らかく、人の運動の邪魔をしない為、違和感なく自然なアシストをしてくれるといいます。
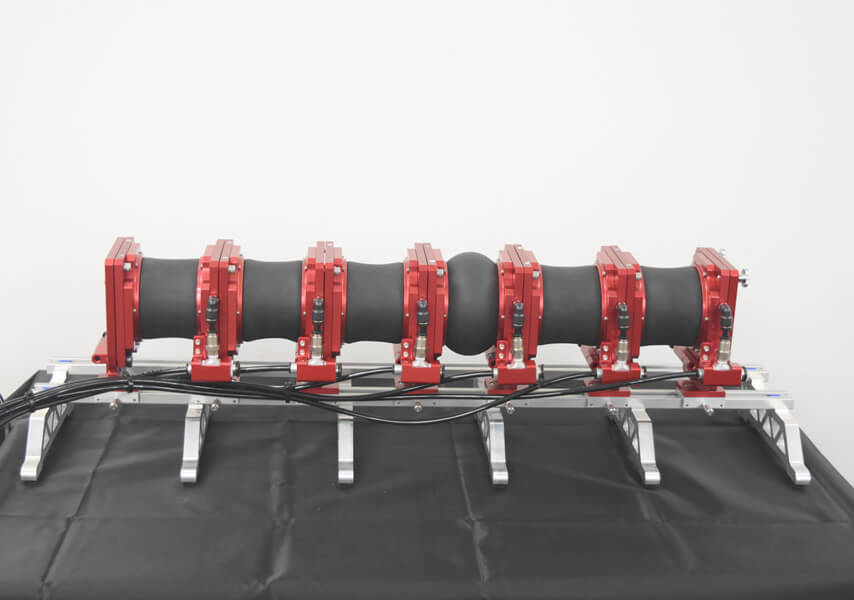
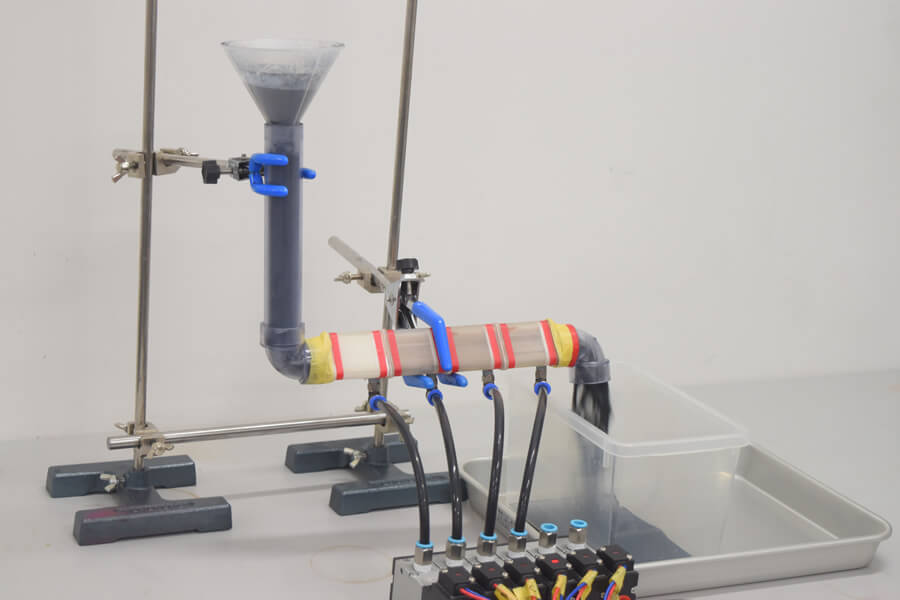
こちらは、経産省とJAXAと共同研究している固体推進薬を連続製造するための蠕動運動型混合搬送機。蠕動運動とは、人の腸などの動きのことをいい、管の中の物を揉みながら運んでいくという仕組みです。この技術を、山田さんらはロケットの燃料を作る作業に展開させました。
イーロン・マスクのスペースXなどのように、アメリカではロケットの燃料というと液体燃料が主流ですが、液体燃料ロケットは高くつく為、わざわざ発射後に回収するために帰還させるそうです。
一方、固体燃料は構造が簡単で、ロケット自体を安く作ることができます.。ただ、現在,燃料となる火薬を作る工程がとても危険で非効率的な為、その製造コストが高くなり、結果、全体の費用自体が大幅に掛かってしまうのだそう。
そこで、ロケットの発射頻度を上げることを目的に、本来であれば安くできる固体燃料をもっと活用すべく、人に代わって燃料を作るのがこちらの装置です。
蓋を空けて中に燃料の材料を入れると、蠕動運動によって、材料を揉みほぐしながら運んでいくことができるようになっています。
現在のロボットは、固まる前の推進薬を搬送する能力はなく,混合するか、どちらかを行うものしかないとうことで、このロボットの様に、混ぜながら運んでいくことができるロボットはまだ無いのだそう。
こちらも、蠕動運動を利用し、株式会社リコーと一緒に研究開発を進めている搬送器。
印刷機は、粉体トナーおよび現像剤の搬送の速さが、印刷速度に影響を与えるということで、品質を安定・維持したまま、搬送のスピードを従来の物よりも早くすることを目的としています。
従来の物は、管内でスクリューが回ることで粉体を搬送しているのですが、これだと摩擦が起きて熱が発生し、粉のトナーが固まってしまうなどして、搬送速度には限界がありました。
そこで、これまでの様な、捻じったり擦ったりではなく、揉んで押し出していく蠕動運動を利用することで、摩擦を軽減して、従来の10倍ほどの搬送を実現できるのだといいます。

バイオメカトロ二クス研究室は、企業との共同研究を積極的に行っており、現在、その数は30社前後に上るといいます。一分野・一企業なので、共同研究の依頼が来ても既に先約がある為に、お断りをするケースも多いのだそう。
これだけ多くの企業との連携・研究が進んでいる理由を山田さんにお伺いすると、研究を活発に行っているのはもちろんですが、それだけでなく、精力的に外に発信をしていることが大きいということでした。
バイオメカトロ二クス研究室ではは、自分達の研究成果を、1年間に国内で約30回、国外で20回は発表しており、講演会や展示会にもよく出ているのだそう。月一回はテレビや新聞といったメディアにも露出しているといいます。
研究をしても、それを発信しないと誰にも気づいてもらえず、次の仕事の依頼も来ないのであり、例えば国際会議などは、わずか15~20分程の発表の為に、一人あたりで30万円前後の費用がかかるそうですが、それを高いコストと考えず、自分たちの成果を世界にアピールする効率的チャンスとして活かしているのだそうです。
世の中のニーズに合致したものを作り、そして見る人が多くなれば、自然と人が来るようになるのだと山田さんはいいます。
バイオメカトロ二クス研究室に入りたいという学生からの応募も多く、入った後は、一人一企業を担当するなど、大きなプロジェクトに取組んでいるのだそう。
ロボットは、使う場が特殊だったり、様々な難しい制約があったりと、民間品と比べて製品化には年月がかかる場合もあるそう。ですが、山田さんをはじめ、研究室ではみなさんが精力的に研究に取り組まれ、成果の国内外への発信にも努めていらっしゃる為、研究を早い段階で実現してくれるのではないかと感じられ、これからも大きく期待したいと思いました!





